
موتور براشلس در میکروموتور چیست؟ بررسی تخصصی ساختار و مزایای میکروموتورهای براشلس

بررسی تخصصی ساختار و مزایای میکروموتورهای براشلس
در دنیای دستگاههای میکروموتور (سوهان برقی) که برای کاشت ناخن، لابراتوار دندانپزشکی، حکاکی دقیق و تعمیرات ظریف استفاده میشوند، موتور قلب تپنده دستگاه است. بیشتر میکروموتورهای سنتی از نوع براشدار (Brushed) هستند، اما نسل جدید موتور براشلس (Brushless یا BLDC) به دلیل عملکرد برتر، به سرعت در حال جایگزینی یا ارتقای مدلهای قدیمی است.
در این مقاله تخصصی برای تعمیرکاران، تکنسینها و کاربران حرفهای سایت micromotor.ir، بهطور کامل بررسی میکنیم که موتور براشلس در میکروموتور چیست، ساختار دقیق آن چگونه است، چگونه کار میکند و چه مزایایی نسبت به موتورهای براشدار دارد.
⸻
مقدمه: تفاوت اساسی موتور براشلس با موتور براشدار
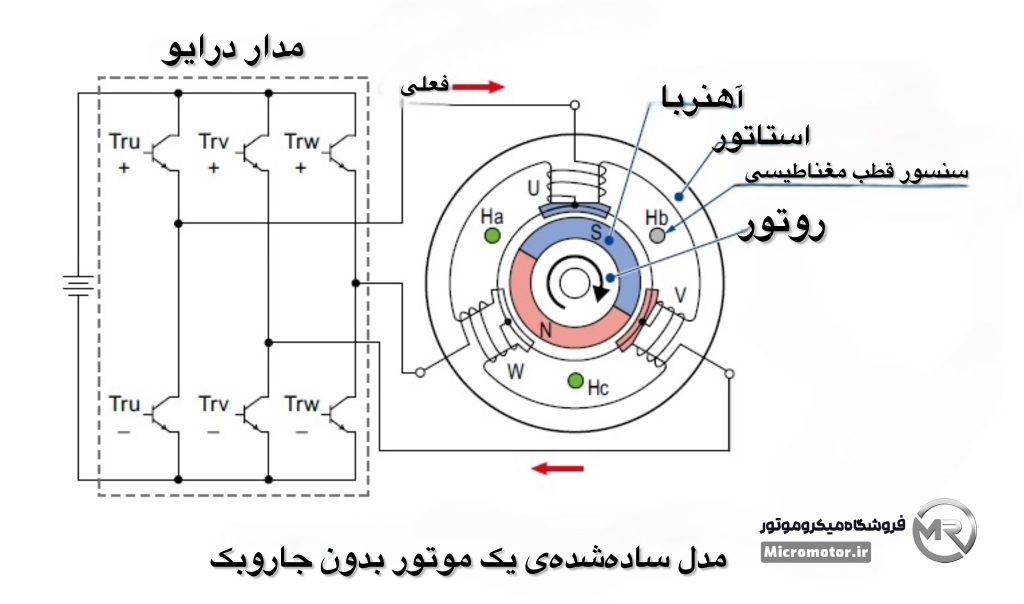
موتور براشلس یا بدون جاروبک، نوعی موتور DC است که به جای استفاده از جاروبک (براش یا زغال) و کموتاتور مکانیکی برای تعویض جهت جریان، از کنترل الکترونیکی (ESC یا Electronic Speed Controller) و سنسورهای هال استفاده میکند.
در میکروموتورهای براشدار، آرمیچر (روتور) سیمپیچدار است و میدان مغناطیسی ثابت توسط آهنرباهای دائمی در بدنه (استاتور) ایجاد میشود. اما در موتور براشلس دقیقاً برعکس است
⸻
مقایسه اینرنر و اوترنر: کدام نوع موتور براشلس برای سوهان برقی ناخن مناسبتر است؟
موتورهای براشلس DC به دو شکل اصلی ساخته میشوند:
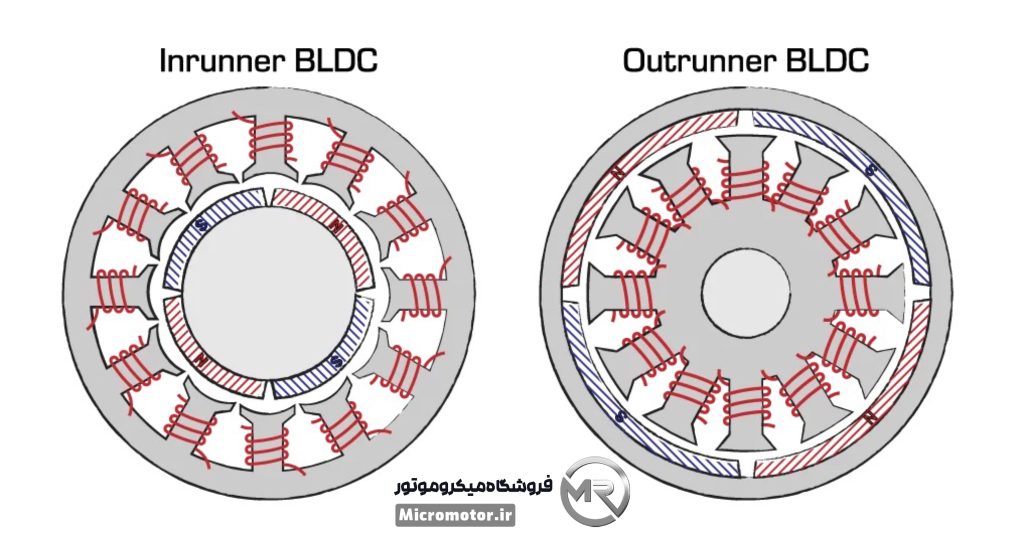
اینرنر (Inrunner) و اوترنر (Outrunner). تفاوت اصلیشون در جایگاه روتور و استاتور است – یعنی بخش چرخان (روتور با آهنرباها) کجا قرار داره و بخش ثابت (استاتور با سیمپیچها) کجا.
⸻
• اینرنر (Inrunner – روتور داخل استاتور):
روتور (آهنرباها) در مرکز موتور قرار داره و استاتور (سیمپیچها) دورش رو احاطه کرده. مثل اینه که آهنرباها داخل یک حلقه سیمپیچدار بچرخن.
(تصویر ساده اینرنر: روتور مرکزی با آهنرباها میچرخه، سیمپیچها ثابت دورش هستن – فلشهای آبی جهت چرخش رو نشون میدن)
مزایا :
• لرزش خیلی کم (دست تکنسین کمتر خسته میشه)
• نویز پایین (مشتریها آرامترن)
• خنککاری بهتر → هندپیس کمتر داغ میشه
• وزن سبکتر و تعادل عالی در سرعتهای بالا (۳۰,۰۰۰–۵۰,۰۰۰ RPM)
• دقت بیشتر در کارهای ظریف مثل کوتیکول و پولیش
تقریباً ۹۵٪ میکروموتورهای براشلس حرفهای ناخن (Prime BL، Saeyang brushless، Strong جدید و مدلهای مشابه در micromotor.ir) از نوع اینرنر هستن.
⸻
• اوترنر (Outrunner – روتور خارج استاتور):
روتور (آهنرباها) دور استاتور میچرخه و استاتور در مرکز ثابت است. مثل اینه که یک قوطی آهنربادار دور سیمپیچهای مرکزی بچرخه.
(تصویر ساده اوترنر: قاب بیرونی موتور با آهنرباها میچرخه، سیمپیچها در مرکز ثابت هستن)
مزایا:
• گشتاور خیلی بالاتر (قدرت بیشتر در دور پایین)
معایب:
• لرزش و نویز بیشتر
• وزن سنگینتر هندپیس
• خنککاری ضعیفتر
• در سرعتهای خیلی بالا تعادل سختتره
به همین دلیل در هندپیسهای سوهان برقی ناخن تقریباً استفاده نمیشه (بیشتر در موتورهای پهپاد، RC یا ابزارهای سنگین کاربرد داره).
⸻
نتیجهگیری این بخش:
اگر میکروموتور براشلس میخرید، حتماً مدل اینرنر انتخاب کنید. این نوع موتور تعادل عالی بین سرعت، دقت، راحتی دست و دوام ایجاد میکنه و دقیقاً برای کار طولانیمدت در سالنهای زیبایی طراحی شده. در سایت micromotor.ir تمام مدلهای براشلس حرفهای از نوع اینرنر هستن و با ضمانت اصالت عرضه میشن.
⸻
استاتور (بخش ثابت)
استاتور (Stator) بخش ثابت و غیرچرخان موتور براشلس (BLDC) است که نقش اصلی آن تولید میدان مغناطیسی دوار برای به حرکت درآوردن روتور میباشد.
در موتورهای براشلس میکروموتور (که اغلب از نوع Outrunner هستند)، ساختار استاتور به صورت زیر است:
• هسته آهنی (Stator Core):
از ورقههای نازک فولاد سیلیکونی (Silicon Steel Lamination) با ضخامت معمولاً ۰٫۳۵ تا ۰٫۵ میلیمتر ساخته میشود. این ورقهها به هم پرچ یا چسبیده میشوند تا تلفات جریان گردابی (Eddy Current Loss) و هیسترزیس به حداقل برسد. هسته معمولاً دارای ۹، ۱۲ یا ۱۸ شیار (Slot) است که سیمپیچها داخل آنها قرار میگیرند.
• سیمپیچها (Coils / Windings):
سیمهای مسی لاکی (معمولاً با قطر ۰٫۱۵ تا ۰٫۴ میلیمتر) به صورت سهفاز (U، V، W) در شیارها پیچیده میشوند. اتصال سیمپیچها میتواند ستاره (Star / Y) یا مثلث (Delta) باشد (در میکروموتورها بیشتر ستاره رایج است). سیمپیچها میدان مغناطیسی چرخان ایجاد میکنند که با تغییر ترتیب انرژیدهی به فازها (توسط کنترلر ESC) روتور را میچرخاند.
• ویژگیهای مهم استاتور در میکروموتورهای براشلس:
• کاملاً ثابت است و به بدنه موتور یا هندپیس متصل میشود → حرارت تولیدشده را به راحتی به بدنه منتقل کرده و خنک میشود.
• برخلاف موتورهای براشدار، سیمپیچها روی استاتور قرار دارند (نه روتور) → نیازی به انتقال جریان به قسمت چرخان نیست → بدون جاروبک، بدون جرقه، بدون سایش.
• در طراحی Outrunner (رایج در سوهان برقی)، استاتور در مرکز قرار دارد و روتور (با آهنرباها) دور آن میچرخد → این ساختار گشتاور بالاتر و سرعت مناسب برای کاربردهای دقیق (تا ۵۰٬۰۰۰ دور) فراهم میکند.
نقش استاتور در عملکرد موتور: وقتی کنترلر الکترونیکی (ESC) جریان را به ترتیب به فازهای مختلف استاتور میفرستد، یک میدان مغناطیسی چرخان ایجاد میشود. روتور (با آهنرباهای دائمی) این میدان را دنبال کرده و میچرخد. سنسورهای هال یا روش سنسورلس (back-EMF) موقعیت روتور را تشخیص میدهند تا کنترلر بداند کدام فاز را بعدی انرژی دهد.
⸻
مزایای استاتور ثابت در میکروموتور:
• خنککاری بهتر (سیمپیچها ثابت هستند و مستقیم به بدنه حرارت میدهند).
• عمر بسیار طولانی (بدون سایش مکانیکی).
• راندمان بالا (۸۵–۹۵٪).
• صدای و لرزش بسیار کم.
• تعمیر آسانتر در صورت مشکل (معمولاً مشکل از کنترلر یا بلبرینگ است، نه سیمپیچ استاتور).
نکته برای تعمیرکاران:
در موتورهای براشلس میکروموتور، اگر استاتور آسیب ببیند (مثلاً سوختن یک فاز سیمپیچ)، معمولاً علائم آن شامل لرزش شدید، عدم چرخش نرم، صدای غیرعادی یا گرم شدن بیش از حد است. با مولتیمتر میتوانید مقاومت فازها را چک کنید (باید تقریباً برابر باشند، معمولاً ۰٫۵ تا ۵ اهم بسته به مدل).
استاتور قلب الکتریکی موتور براشلس است و کیفیت ساخت آن (ورقهها، سیمپیچ، عایقبندی) مستقیماً روی دوام، قدرت و صدای دستگاه سوهان برقی تأثیر میگذارد.
⸻
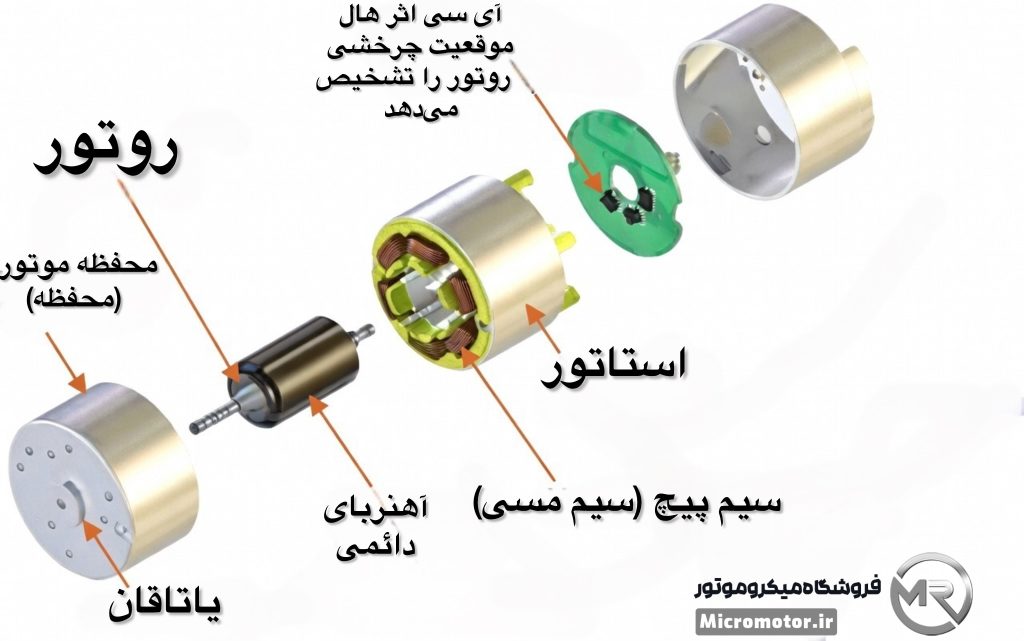
روتور (بخش متحرک)
روتور (Rotor) بخش متحرک و چرخان موتور براشلس (BLDC) است که نیروی مکانیکی خروجی (چرخش شفت) را تولید میکند. در موتورهای براشلس میکروموتور (بهخصوص نوع Outrunner که در سوهان برقی و هندپیسهای دقیق رایج است)، روتور دقیقاً برعکس موتورهای براشدار طراحی شده است.
ساختار اصلی روتور در میکروموتورهای براشلس
• آهنرباهای دائمی (Permanent Magnets) مهمترین جزء روتور. معمولاً از نئودیمیوم (NdFeB) با گرید بالا (N35 تا N52) ساخته میشوند.
• تعداد قطبها: معمولاً ۴، ۶، ۸، ۱۰، ۱۲ یا ۱۴ قطب (جفت قطبهای N و S بهصورت متناوب چیده میشوند).
• در طراحی Outrunner، آهنرباها بهصورت حلقهای یا کمانی داخل پوسته روتور چسبیده یا پرس شدهاند.
• این آهنرباها میدان مغناطیسی ثابت قوی ایجاد میکنند که با میدان چرخان استاتور تعامل کرده و گشتاور تولید میکند.
⸻
• پوسته یا بدنه روتور (Rotor Bell / Can / Housing) معمولاً از آلومینیوم یا فولاد سبک ساخته میشود (در مدلهای Outrunner). شکل آن شبیه یک استوانه یا کاسه وارونه است که استاتور را در بر میگیرد. آهنرباها داخل این پوسته نصب میشوند و شفت دقیقاً به مرکز آن متصل است.
• شفت خروجی (Shaft) میله فولادی سختکاریشده (معمولاً با سختی HRC ۵۸–۶۲) که از مرکز روتور عبور میکند. انتهای شفت معمولاً رزوهدار (M6 یا ۲.۳۵ میلیمتر برای آچارک) یا دندانهدار است تا ابزار (فرز، سوهان، سنگ) به آن متصل شود. شفت از دو یا سه بلبرینگ عبور میکند تا چرخش بدون لرزش و با دقت بالا داشته باشد.
• بلبرینگها (Bearings) معمولاً دو بلبرینگ (یکی در بالا و یکی در پایین روتور) یا سه بلبرینگ (در مدلهای پیشرفتهتر). نوع رایج: بلبرینگهای دقیق سرامیکی یا فولادی ABEC-5 / ABEC-7 / ABEC-9. نقش: تحمل بار شعاعی و محوری، کاهش اصطکاک و لرزش در سرعتهای بالا (تا ۵۰٬۰۰۰ دور در دقیقه).
نحوه عملکرد روتور
روتور خودش هیچ سیمپیچی ندارد و جریان الکتریکی دریافت نمیکند.
میدان مغناطیسی چرخان تولیدشده توسط استاتور (با کمک کنترلر ESC) روی آهنرباهای دائمی روتور نیرو وارد میکند و باعث چرخش آن میشود.
سنسورهای هال (یا روش سنسورلس) موقعیت دقیق قطبهای مغناطیسی روتور را تشخیص میدهند تا کنترلر بداند کدام فاز استاتور را بعدی انرژی دهد.
⸻
ویژگیهای مهم روتور در میکروموتورهای براشلس
• وزن سبک و تعادل بالا → برای جلوگیری از لرزش در سرعتهای خیلی بالا ضروری است.
• عدم وجود جاروبک و کموتاتور → بدون سایش، بدون جرقه، بدون تولید گرد و غبار کربن.
• گشتاور اولیه بالا → بهخصوص در طراحی Outrunner که قطر روتور بزرگتر است.
• حرارت کمتر در روتور → چون سیمپیچ ندارد و فقط آهنربا و فلز است، گرمای کمتری تولید میکند (گرما عمدتاً در استاتور ایجاد میشود).
مزایای روتور در کاربرد میکروموتور
• عمر بسیار طولانی (عمدتاً فقط بلبرینگها ممکن است بعد از چند هزار ساعت نیاز به تعویض داشته باشند).
• صدای و لرزش بسیار کم (ایدهآل برای کار طولانی در سالن زیبایی یا لابراتوار).
• پاسخ سریع به تغییرات سرعت (کنترل دقیق با ESC).
• امکان رسیدن به دورهای بالا بدون افت گشتاور شدید.
نکات مهم برای تعمیرکاران و کاربران
• اگر موتور لرزش غیرعادی دارد → احتمالاً بلبرینگها خراب شدهاند یا روتور تعادل خود را از دست داده (خمیدگی شفت یا جدا شدن آهنربا).
• اگر موتور اصلاً نمیچرخد اما صدا میدهد → ممکن است آهنربای روتور ضعیف یا دمگنت شده باشد (بهخصوص در موتورهای ارزان چینی).
• هنگام باز کردن هندپیس، مراقب باشید آهنرباها به استاتور نچسبند (نیروی مغناطیسی بسیار قوی است).
• بلبرینگهای جایگزین باید دقیقاً همان سایز و کلاس دقت باشند (معمولاً ۶×۱۳×۵ یا ۷×۱۳×۴ میلیمتر).
روتور در موتور براشلس، بخش ساده اما بسیار مهم و بادوام است که تقریباً تمام مزایای «عدم نیاز به نگهداری» و «عمر طولانی» موتورهای بدون جاروبک از آن ناشی میشود. کیفیت آهنرباها و دقت ساخت شفت و پوسته روتور، تفاوت اصلی بین یک میکروموتور ارزان و یک دستگاه حرفهای با دوام ۱۰٬۰۰۰+ ساعت است.
⸻
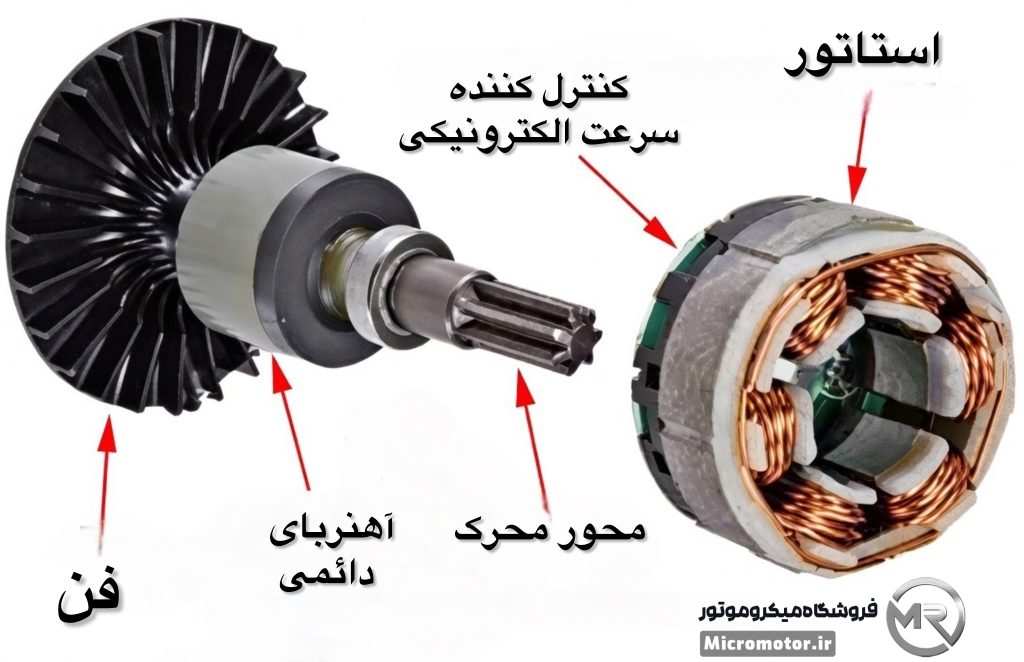
برد کنترل الکترونیکی (ESC) در موتور براشلس میکروموتور
ESC مخفف Electronic Speed Controller (کنترلر سرعت الکترونیکی) است و مغز الکترونیکی موتور براشلس (BLDC) محسوب میشود. بدون ESC، موتور براشلس اصلاً نمیتواند کار کند؛ چون برخلاف موتورهای براشدار که با جریان DC ساده میچرخند، موتور براشلس نیاز به تغییر ترتیب جریان در سه فاز استاتور دارد تا میدان مغناطیسی چرخان ایجاد شود.
نقش اصلی برد کنترل الکترونیکی (ESC)
• تبدیل سیگنال ورودی (معمولاً PWM از ولوم سرعت یا پدال پا) به سیگنال سهفاز مناسب برای موتور.
• تشخیص موقعیت روتور (با سنسور هال یا روش سنسورلس).
• کنترل دقیق سرعت، جهت چرخش و گشتاور.
• حفاظت موتور در برابر اضافهبار، گرمای بیش از حد، اتصال کوتاه و ولتاژ نامناسب.
⸻
اجزای اصلی برد ESC در میکروموتورهای براشلس
1. میکروکنترلر (MCU) مغز اصلی برد (معمولاً STM32، ATmega، یا چیپهای اختصاصی چینی مانند EFM8). وظیفه: پردازش سیگنال PWM ورودی، محاسبه زمانبندی فازها (commutation timing)، و اجرای الگوریتم کنترل (معمولاً Six-Step یا Sinusoidal/FOC در مدلهای پیشرفته).
2. درایورهای قدرت (MOSFET یا IGBT) معمولاً ۶ عدد MOSFET (۳ جفت High-Side و Low-Side) به صورت پل H سهفاز. این ترانزیستورها جریان اصلی (تا ۱۰–۳۰ آمپر در میکروموتورهای حرفهای) را به سیمپیچهای استاتور میفرستند. در بردهای خوب از MOSFETهای با Rdson پایین و خنککننده مناسب استفاده میشود.
3. سنسورهای هال یا مدار تشخیص Back-EMF
• اگر سنسوردار باشد: سه سنسور هال روی برد یا داخل موتور، موقعیت روتور را میدهند.
• اگر سنسورلس (Sensorless) باشد: مدار اندازهگیری ولتاژ Back-EMF (القای معکوس) در فازهای خاموش برای تشخیص موقعیت روتور.
4. مدار تغذیه و رگولاتور ولتاژ معمولاً ورودی ۱۲–۳۶ ولت DC (بسته به مدل میکروموتور). رگولاتور ۵ ولت یا ۳.۳ ولت برای تغذیه MCU و مدارهای کممصرف.
5. مدارهای حفاظتی
• حفاظت اضافهجریان (Overcurrent)
• حفاظت اضافهدما (Thermal Shutdown)
• حفاظت ولتاژ پایین/بالا (UVLO / OVP)
• قفل شدن موتور (Stall Detection) و خاموشی خودکار
6. ورودی سیگنال معمولاً کانکتور ۳ پین برای سیگنال PWM (Pulse Width Modulation)، VCC و GND. در برخی مدلها ورودی آنالوگ (پتانسیومتر) یا دیجیتال (UART/I2C) هم وجود دارد.
⸻
نحوه کار ESC به زبان ساده
1. سیگنال PWM از ولوم سرعت یا پدال میآید (مثلاً ۱ تا ۲ میلیثانیه پالس = ۰ تا ۱۰۰٪ سرعت).
2. MCU سیگنال را میخواند و موقعیت فعلی روتور را تشخیص میدهد.
3. بر اساس موقعیت روتور، ۶ MOSFET را به ترتیب روشن/خاموش میکند تا جریان به فازهای درست استاتور برود.
4. این کار هزاران بار در ثانیه تکرار میشود → میدان مغناطیسی چرخان ایجاد میشود → روتور میچرخد.
5. اگر بار زیاد شود یا موتور قفل کند، ESC جریان را قطع میکند تا موتور و برد نسوزد.
تفاوت ESCهای میکروموتور با ESCهای drone
• میکروموتورها معمولاً Six-Step (Trapezoidal) سادهتر و ارزانتر هستند.
• سرعت بالا (تا ۵۰٬۰۰۰ دور) اما گشتاور متوسط.
• تمرکز روی صدای کم، لرزش ناچیز و کنترل نرم (نه حداکثر قدرت لحظهای مثل drone).
⸻
نکات مهم برای تعمیرکاران
• علائم خرابی ESC:
• موتور اصلاً نمیچرخد اما LED روشن است.
• لرزش شدید یا صدای تقتق (مشکل در تشخیص موقعیت روتور).
• گرم شدن بیش از حد برد یا بوی سوختگی.
• موتور فقط در یک جهت میچرخد یا سرعت ناپایدار است.
• چک سریع با مولتیمتر:
• مقاومت بین سه سیم موتور (U-V, V-W, W-U) باید تقریباً برابر باشد (معمولاً ۰.۵ تا ۵ اهم).
• چک دیودهای داخلی MOSFETها (بدنه برد).
• ولتاژ ۵ ولت روی رگولاتور.
• تعویض ESC: در بسیاری از دستگاههای چینی (ماراتن، strong، saeyang و غیره)، ESC داخل باکس کنترل است و به صورت ماژول جداگانه فروخته میشود. هنگام تعویض، حتماً ولتاژ ورودی، جریان نامی و نوع سیگنال (PWM یا آنالوگ) را چک کنید.
نتیجهگیری
برد کنترل الکترونیکی (ESC) مهمترین تفاوت موتور براشلس با براشدار است. کیفیت ESC تعیینکننده نرمی چرخش، عدم لرزش، عمر موتور و حفاظت دستگاه است.
در میکروموتورهای حرفهای، ESCهای با کیفیت بالاتر (با الگوریتم Sinusoidal یا FOC) صدای کمتر، گرمای کمتر و کنترل دقیقتری ارائه میدهند — دقیقاً چیزی که تکنسینهای حرفهای کاشت ناخن و لابراتوار دندانپزشکی به آن نیاز دارند.
⸻
چرا هندپیس موتور براشلس سه سیم دارد؟
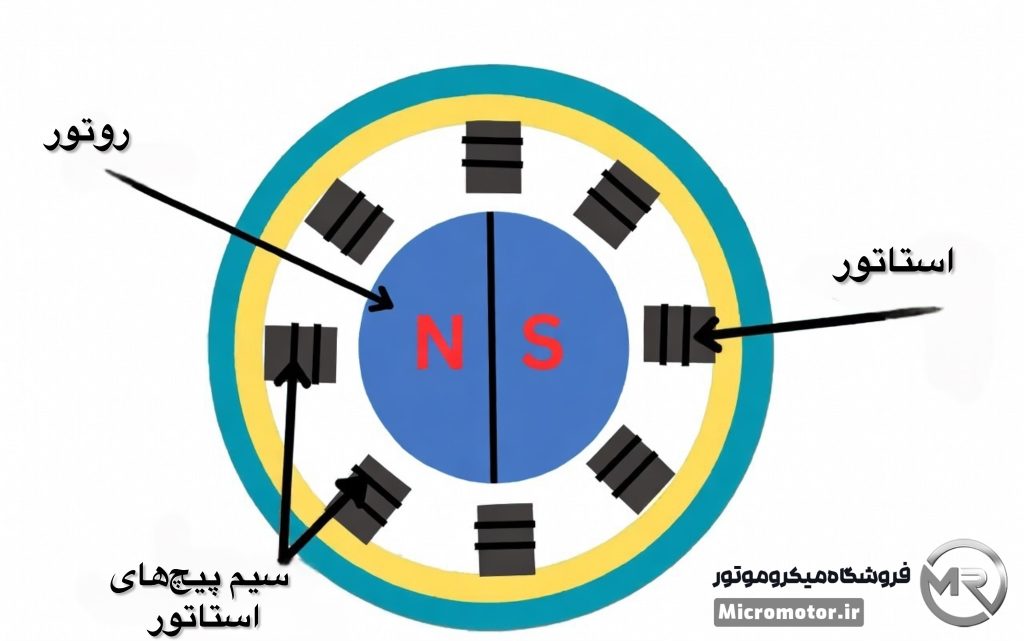
موتور براشلس (BLDC) در میکروموتور و سوهان برقی سهفاز است.
• برخلاف موتورهای براشدار قدیمی که با دو سیم (+ و –) کار میکنند،
• موتور براشلس نیاز به جریان متناوب سهفاز دارد تا میدان مغناطیسی چرخان ایجاد شود و روتور بچرخد.
موتورهای براشلس معمولاً از نوع سهفاز هستند. در این موتورها، داخل استاتور سه مجموعه سیمپیچ وجود دارد. برای ایجاد میدان مغناطیسی چرخان، باید جریان الکتریکی بهصورت مرحلهای بین این سه سیمپیچ تغییر کند.
به همین دلیل:
• هر سیم، به یکی از فازهای موتور متصل است.
• برد کنترل، جریان را بهصورت متوالی بین این سه سیم جابهجا میکند.
• این جابهجایی باعث ایجاد میدان مغناطیسی چرخان و در نتیجه چرخش روتور میشود.
بهطور خلاصه:
سه سیم در هندپیس میکروموتور براشلس برای تأمین جریان سهفاز و ایجاد میدان مغناطیسی چرخان استفاده میشوند.
⸻
مزایای موتور براشلس در میکروموتور
1. طول عمر بالا
به دلیل حذف جاروبک:
• سایش مکانیکی وجود ندارد
• قطعات دیرتر فرسوده میشوند
2. صدای کمتر
میکروموتورهای براشلس:
• صدای یکنواخت و آرام دارند
• برای محیطهای حساس مناسبتر هستند
3. لرزش پایین و دقت بالا
کنترل الکترونیکی باعث:
• حرکت نرمتر
• دقت بیشتر در کارهای ظریف
4. راندمان و قدرت بیشتر
این موتورها:
• انرژی را بهتر به حرکت تبدیل میکنند
• گرمای کمتری تولید میکنند
5. کنترل دقیق سرعت
در میکروموتورهای براشلس:
• سرعت کاملاً قابل تنظیم است
• در محدودههای مختلف بدون افت قدرت کار میکنند
⸻
کاربرد میکروموتورهای براشلس
در ادامه مهمترین کاربردهای عملی آنها را به صورت دستهبندیشده بررسی میکنیم:
۱. دندانپزشکی و لابراتوار دندان (مهمترین کاربرد)
• میکروموتورهای براشلس دندانپزشکی (Dental Brushless Micromotor)
• تراش، شکلدهی و پولیش دقیق دندان
• آمادهسازی حفره برای پر کردن (Cavity Preparation)
• اندودانتیکس (درمان ریشه)
• پروتزسازی و لابراتوار (ساخت پروتز، ایمپلنت، تراش موقت)
• جراحی ایمپلنت (Implant Motors) با کنترل دقیق گشتاور و سرعت (تا ۵۰٬۰۰۰ دور)
• مزایا در این حوزه: لرزش ناچیز، صدای کم (ایدهآل برای بیمار و پزشک)، خنک ماندن هندپیس در کار طولانی، دقت بالا بدون گرمای بیش از حد.
⸻
۲. کاشت و طراحی ناخن (Nail Drill / Manicure & Pedicure)
• سوهان برقی حرفهای و بیصدا (Nail Art Micromotor)
• تراش، فرمدهی، پولیش و برداشتن ژل/اکریلیک
• دستگاههای قابل حمل و ثابت با سرعت ۳۰٬۰۰۰ تا ۵۰٬۰۰۰ دور
• مزایا: صدای بسیار کم (مناسب سالن زیبایی)، لرزش ناچیز (دقت بالا بدون خستگی دست تکنسین)، عمر طولانی بدون تعویض زغال هر چند ماه یکبار.
⸻
۳. جواهرسازی و حکاکی دقیق (Jewelry & Engraving)
• حکاکی، برش، پولیش و سنگتراشی فلزات و سنگهای قیمتی
• ساخت زیورآلات، تعمیر ساعت، جواهرات دستی
• مزایا: کنترل دقیق سرعت و گشتاور، لرزش کم برای کارهای ظریف، عدم تولید گرد و غبار کربن (تمیز ماندن محیط کار).
⸻
۴. تعمیرات الکترونیک و PCB
• حکاکی، برش، دریلکاری دقیق بردهای مدار چاپی (PCB Drilling & Engraving)
• تعمیر موبایل، لپتاپ، قطعات کوچک الکترونیکی
• مزایا: سرعت بالا با لرزش کم، دقت عالی بدون آسیب به قطعات حساس.
⸻
۵. سایر کاربردهای تخصصی
• پزشکی و جراحی دقیق — دریل استخوان کوچک، ابزارهای زیبایی جراحی، دستگاههای میکروسکوپی
• مدلسازی و هابی — هواپیمای مدل، کوادکوپتر کوچک، رباتیک دقیق
• ابزارهای دستی برقی کوچک — فرز انگشتی، دستگاههای حکاکی چوب/فلز کوچک
• اتوماسیون صنعتی کوچک — رباتهای دقیق، دستگاههای CNC کوچک، کنترل حرکت ظریف
⸻
سوالات متداول
میکروموتور براشلس چه تفاوتی با مدل معمولی دارد؟
مهمترین تفاوت، حذف جاروبک و استفاده از کنترل الکترونیکی است که باعث افزایش طول عمر و کاهش صدا و لرزش میشود.
آیا میکروموتور براشلس نیاز به سرویس دارد؟
در مقایسه با مدلهای براشدار، نیاز به سرویس بسیار کمتر است.
مهمترین مزیت میکروموتور براشلس چیست؟
لرزش کم، صدای پایین، راندمان بالا و طول عمر بیشتر.


اولین دیدگاه را ثبت کنید